Research
What if we could teach robots using language?
This research question is being tackled by the field of Interactive Task Learning. My focus is on creating robotic agents that can learn new tasks in one-shot from natural language instruction. My research involves a cognitive architecture approach, where we investigate issues of knowledge representation, reasoning, and explanation-based learning.
Rosie
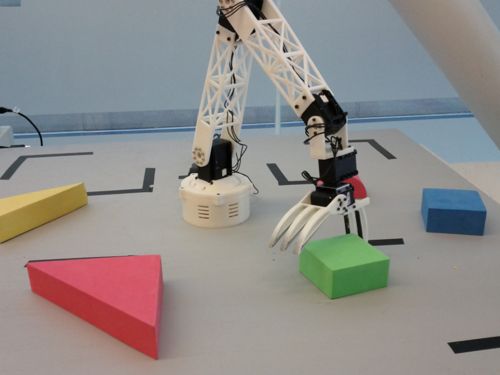
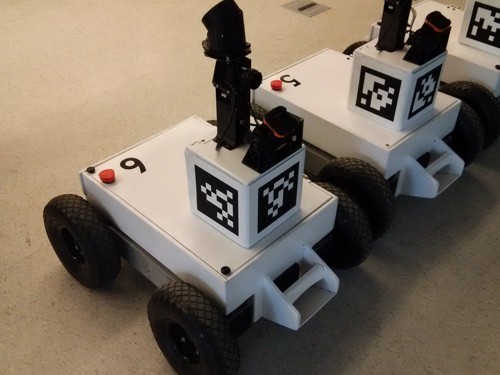
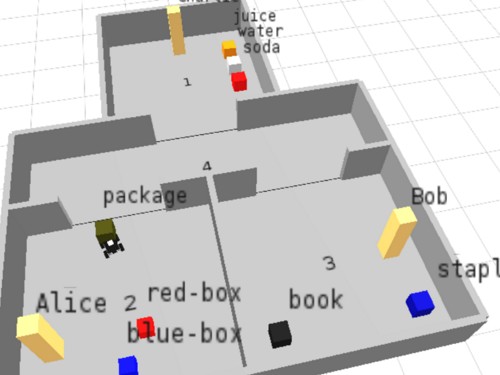
Rosie is the name of the Interactive Task Learning agent I have helped develop at the University of Michigan in the Soar Lab. It is written in the Soar Cognitive Architecture. It can learn many different tasks, games, and puzzles and has been deployed in many different real and simulated environments.
Watch a demo video of it learning tasks in a mobile environment
Domains

Publications
-
Expanding Task Diversity in Explanation-Based Interactive Task Learning
2021 | Aaron Mininger Mininger
-
Using Domain Knowledge to Correct Anchoring Errors in a Cog. Arch.
2019 | Aaron Mininger, John E. Laird Mininger, Laird
-
Characteristics of the Learning Problem in Situated Interactive Task Learning
2019 | John E. Laird, Shiwali Mohan, James Kirk, Aaron Mininger Laird, Mohan, Kirk, Mininger
-
Interactively Learning a Blend of Goal and Procedural Tasks
2018 | Aaron Mininger, John E. Laird Mininger, Laird
-
Grounding Language for Interactive Task Learning
2017 | Peter Lindes, Aaron Mininger, James Kirk, John E. Laird Lindes, Mininger, Kirk, Laird
-
Interactively Learning Strategies for Handling References to Unseen or Unknown Objects
2016 | Aaron Mininger, John E. Laird Mininger, Laird
-
Learning Task Goals Interactively with Visual Demonstrations
2016 | James Kirk, Aaron Mininger, John E. Laird Kirk, Mininger, Laird
-
Agent Requirements for Effective and Efficient Task-Oriented Dialog
2015 | Shiwali Mohan, James Kirk, Aaron Mininger, John E. Laird Mohan, Kirk, Mininger, Laird
-
Towards an Indexical Model of Situated Language Comprehension
2014 | Shiwali Mohan, Aaron Mininger, John E. Laird Mohan, Mininger, Laird
-
Acquiring Grounded Representations of Words with Situated Interactive Instruction
2012 | Shiwali Mohan, Aaron Mininger, James Kirk, John E. Laird Mohan, Mininger, Kirk, Laird
-
Learning Grounded Language through Situated Interactive Instruction
2012 | Shiwali Mohan, Aaron Mininger, James Kirk, John E. Laird Mohan, Mininger, Kirk, Laird